


107/1 ถ.เฉลิมพระเกียรติ ร.9 แขวงประเวศ เขตประเวศ กรุงเทพฯ 10250

Tel : 02-726-8000
Fax : 02-726-8266
Email : sales@pneumax.co.th
การเชื่อมต่อมอเตอร์และอินเวอร์เตอร์

วิธีการปรับปรุงประสิทธิภาพการทำงานเมื่อต้องเชื่อมต่ออุปกรณ์ควบคุมความเร็ว รอบมอเตอร์ (VSD) เข้ากับมอเตอร์ไฟฟ้า An Improved approach for connecting VSD and Electric Motors
ในการที่จะเชื่อมต่อมอเตอร์เข้ากับอินเวอร์เตอร์นั้น มีข้อควรระวังบางประการที่ต้องดูแลเป็นพิเศษ ในบางครั้ง ระยะของสายไฟของมอเตอร์สามารถก่อให้เกิดแรงดันไฟฟ้าเกิน (Overvoltage) ในระยะเวลาสั้น ๆ ได้ที่เทอร์มินอลของมอเตอร์ เหตุการณ์นี้จะทำให้ฉนวนของขดลวดมอเตอร์มีอายุการใช้งานที่สั้นลง และถ้าหากการออกแบบของมอเตอร์นั้นไม่ดีพอ ก็อาจจะทำให้มอเตอร์เกิดการุดได้บ่อยครั้งที่ทางผู้ใช้งานหรือผู้ให้คำปรึกษานั้น อาจจะมองข้ามปัญหานี้และละเลยที่จะคำนึงถึงการออกแบบป้องกันที่เพียงพอ บทความนี้จะแนะนำวิธีการเพื่อหลีกเลี่ยงสิ่งที่จะก่อให้เกิดปัญหาเหล่านี้ได้
ในการใช้งานโดยทั่วไปเมื่อความยาวสายไฟของมอเตอร์มีระยะยาวเกิน 10 เมตร ก็มักจะเกิดแรงดันไฟฟ้าเกิน (Overvoltage) เกิดขึ้น และเมื่อความยาวของสายไฟยาวมากขึ้นเท่าไหร่ แรงดันไฟฟ้าเกิน (Overvoltage) ก็จะยิ่งเกิดสูงมากขึ้นเท่านั้น และผลเสียนี้จะยิ่งทวีความรุนแรงขึ้นหากสายไฟที่ใช้เป็นสายแบบหุ้มฉนวน (Shielded Cable) แต่ยังไงก็ตาม แรงดันไฟฟ้าเกิน (Overvoltage) ก็จะถูกจำกัดไว้ที่เพียง 2 เท่าของแรงดัน DC Bus เท่านั้น อัตราการเพิ่มขึ้นของแรงดันที่ขาออกของอินเวอร์เตอร์ (Inverter) บ่อยครั้งเราเรียกว่า dV/dt ซึ่งถ้าหากความถี่ในการสวิตชิ่ง (Switching Frequency) สูงขึ้นก็จะสร้างแรงดันสูงสุดชั่วขณะ (Transient Peak) ที่สูงขึ้น ปรากฏการณ์ที่เกิดขึ้นนี้มีสาเหตุมาจากสภาวะของการเก็บประจุแอบแฝง (Parasitic Capacitance) (เกิดขึ้นเมื่อมีตัวนำ (Conductor) 2 ตัว เช่น มอเตอร์และสายไฟของมอเตอร์ที่มีความต่างศักดิ์กัน (Different Potential) และตั้งอยู่ใกล้กัน ส่งผลให้ได้รับอิทธิพลจากสนามแม่เหล็กไฟฟ้า (Electric Field) ของตัวนำอีกตัวหนึ่ง และทำหน้าที่กักเก็บประจุไฟฟ้าเหมือนกับคาปาซิเตอร์) ซึ่งค่าทรานเซียนต์ที่เกิดขึ้นเหล่านี้ ส่งผลให้อินเวอร์เตอร์, สายไฟ รวมถึงมอเตอร์ไฟฟ้า เกิดความเสียหายมากขึ้น นั้นก็หมายถึงการมีประสิทธิภาพการทำงานที่ลดลงนั่นเอง

ผลกระทบอีกอย่างหนึ่งเมื่อมีการใช้อินเวอร์เตอร์ก็คือ การลดอายุการใช้งานของตลับลูกปืนในมอเตอร์ เนื่องจากแรงดันร่วม (Common Mode Voltage) ซึ่งถูกสร้างขึ้นโดยอินเวอร์เตอร์ในชุดควบคุมความเร็วมอเตอร์ (VSD) (คลื่นรบกวนที่เหนี่ยวนำเข้าไปในสายไฟโดยการสวิตชิ่ง) และมันจะสร้างกระแสความถี่สูงไปยังตลับลูกปืนในมอเตอร์ ขึ้นอยู่กับชนิดของมอเตอร์ และการออกแบบของมอเตอร์ว่าตลับลูกปืนของมอเตอร์นั้นมีการป้องกันไว้ดีหรือไม่ การเกิดขึ้นของกระแสร่วม (Common Mode Current) นั้นสามารถเกิดขึ้นในมอเตอร์ได้ 3 ลูปด้วยกัน
1. ลูประหว่างสเตเตอร์ (Stators), ขดลวด และเพลาของมอเตอร์ในกรณีนี้ กระแสเหนี่ยวนำจะไหลผ่านตลับลูกปืน 2 รอบ
2. ลูประหว่าง ขดลวด Parasitic Capacitor และเพลาของมอเตอร์ ซึ่งต่อถึงดินด้วยโหลด ในกรณีนี้จะเกิดขึ้นได้ก็ต่อเมื่อโครงของมอเตอร์นั้นไม่ได้ต่อลงดินอย่างเพียงพอ ลูกคลื่นของกระแสคาปาซิตีฟ (Capacitive Current) นั้นจะไหลผ่านไปยังลูกปืน
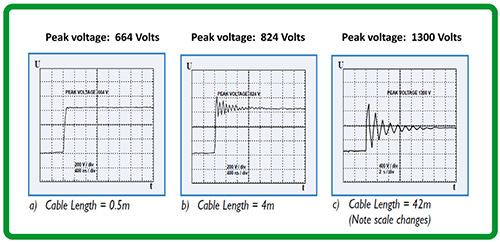
รูปที่ 1 เปรียบเทียบความยาวของสายไฟระหว่างมอเตอร์และไดรฟ์ที่สามารถสร้างแรงดันไฟฟ้าสูงสุดที่ขั้วต่อมอเตอร์
3. ลูประหว่าง Parasitic Capacitor ของสเตเตอร์, ขดลวดโรเตอร์, โครงมอเตอร์ และตลับลูกปืน ในกรณีนี้ ตัวโครงของมอเตอร์นั้นต่อลงดินอย่างถูกต้องและกระแสของตลับลูกปืนนั้นเป็นสัดส่วนของแรงดันร่วม (Common Mode Voltage) กระแสของตลับลูกปืนเกิดขึ้นเพราะการคายประจุของไฟฟ้าสถิต (Capacitive Electrostatic Discharge) เพื่อที่จะจำกัดผลกระทบของแรงดันไฟฟ้าเกิน (Overvoltage) และกระแสไฟฟ้าสูงสุด (Current Peak) ได้มีการคิดค้นการแก้ปัญหาซึ่งแต่ละวิธีการนั้นต้องเลือกใช้ตามแต่ละการใช้งาน
ใช้ซอฟต์แวร์สำหรับการป้องกัน (Software Protection)
อินเวอร์เตอร์บางชนิดนั้นได้มีการตั้งค่าเบื้องต้นด้วยซอฟต์แวร์ เพื่อที่จะทำให้มีการใช้งานได้อย่างมีเสถียรภาพมากขึ้น อินเวอร์เตอร์รุ่นใหม่ ๆท นั้นได้ทำการติดตั้งการชุดควบคุมมอเตอร์ที่สามารถป้องกันสภาวะที่เรียกว่า “Double Transition” ได้ ซึ่งสภาวะนี้จะเกิดขึ้นได้ก็ต่อเมื่อเฟสหนึ่งเฟสใดของมอเตอร์เปลี่ยนสถานะจากลบเป็นบวก DC ในขณะที่อีกหนึ่งเฟสเปลี่ยนสถานะจากบวกเป็นลบ
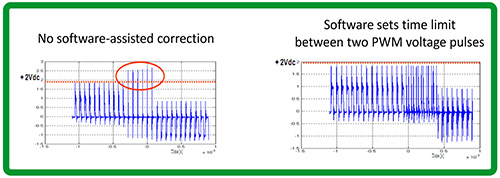
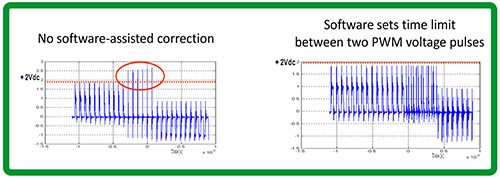
รูปที่ 2 ผลจากการใช้ซอฟต์แวร์สำหรับป้องกันสภาวะที่เรียกว่า “Double Transition”
รูปคลื่น PWM ที่สั้นเกินไปเมื่อเทียบกับค่าคงที่เวลา (Time Constant) ของสายนั้นสามารถนำไปสู่การทับซ้อนกัน (Superimposition) ของคลื่นการสั่น 2 คลื่น ซึ่งจะทำให้เกิดแรงดันไฟฟ้าเกิน (Overvoltage) ที่มาก กว่า 2 เท่าของแรงดัน DC bus ได้ inverterรุ่นใหม่นั้นได้มีเทคโนโลยีที่สามารถหลีกเลี่ยงการทับซ้อนกัน (Superimposition) ของแรงดันโดยการตั้งค่าต่ำสุดของเวลาระหว่างลูกคลื่นแรงดัน PWM 2 ลูก (ดูภาพประกอบรูปที่ 2) การจำกัดค่าเวลานั้นจะทำให้ประสิทธิภาพการทำงานของอินเวอร์เตอร์ลดลง (แรงบิดลดลง 3%) แต่จะไม่ทำให้เกิดผลกระทบใด ๆ ในการใช้งานตามปกติทั่วไป
ใช้วิธีการ Output Reactor
เอาต์พุตรีแอคเตอร์ (Output Reactor) จะต่อต้านการเปลี่ยนแปลงที่รวดเร็วของกระแสและส่วนใหญ่จะติดตั้งในอุปกรณ์ขับมอเตอร์เพื่อที่ จะจำกัดกระแสขณะสตาร์ท ทั้งยังสามารถป้องกันอินเวอร์เตอร์และมอเตอร์ได้อีกด้วย มอเตอร์โช้ค (Motor Choke)เมื่อรวมกับ Parasitic Capacitance ของสายไฟมอเตอร์ จะลดค่า dV/dt และแรงดันสูงสุดได้ ผลลัพธ์ที่ได้นั้นขึ้นอยู่กับชนิดและความยาวของสายไฟ แต่อย่างไรก็ตามการใช้งานด้วยวิธีการนี้ ตามทฤษฏีแล้วหากเลือกใช้ Output Reactor ที่ไม่ถูกต้อง ก็อาจจะทำให้สัญญาณที่เกิดขึ้นเกินจากค่าที่ต้องการ (Overshoot) ได้ ดังนั้นจึงควรระมัดระวังในข้อนี้ด้วย
ใช้วิธีการ Output dV/dt Filter
การแก้ปัญหาด้วยวิธีการใช้ Output dV/dt Filter นั้นเป็นการแก้ไขปัญหาที่มีราคาย่อมเยาที่สุดที่สามารถการันตีการป้องกันมอเตอร์ และลดผลกระทบของการเกิดกระแสไฟฟ้าเกิน (Overcurrent) ต่ออินเวอร์เตอร์ COVER STORY หากใช้งาน Sinus Filter ร่วมกับ Common Mode Filter จะสามารถกำจัดกระแสที่ตลับลูกปืน (รูปที่ 3) และยังลดปัญหาการรบกวนโดยสนามแม่เหล็กไฟฟ้า (EMC) ในแหล่งจ่ายได้อีกด้วย การใช้งานฟิลเตอร์ทั้ง 2 ชนิดร่วมกันนั้นเป็นวิธีการแก้ปัญหาที่ได้ผลมากที่สุดในการหลีก เลี่ยงปัญหาที่จะเกิดขึ้นในการใช้งานอินเวอร์เตอร์ต่อร่วมกับมอเตอร์ อีกทั้งยังเป็นวิธีที่ประหยัดหากสายไฟของมอเตอร์นั้นมีขนาดที่ยาวและเป็นงานที่ไม่ต้องการสายที่มีฉนวน INDUSTRIAL
รูปที่ 3 ไดอะแกรมแสดงถึงการทำงานของ Sinus Filter
ฟิลเตอร์ชนิดนี้ จะช่วยลดค่าของ dV/dt ดังนั้นผลกระทบของแรงดันไฟฟ้าเกิน (Overvoltage) และการรั่วของกระแสจากคาปาซิตีฟ (Capacitive Current) ระหว่างเฟสต่าง ๆ หรือจากเฟสถึงสายดินก็จะถูกลดลง อีกทั้งฟิลเตอร์ชนิดนี้ยังมีความยืดหยุ่น เนื่องจากสามารถใช้ งานได้กับมอเตอร์และสายไฟเกือบทุกชนิดโดยไม่ก่อให้เกิดปัญหาใด ๆ วิธีการนี้จะเป็นทางเลือกที่แนะนำหากไม่ทราบถึงรายละเอียดที่จำเพาะเจาะจง (Specification) ของมอเตอร์ตัวนั้น ๆ
ใช้วิธีการ Sinus Filter
การออกแบบใช้งานในลักษณะนี้ เป็น Low Pass Filter (Electronics Filter ซึ่งอนุญาตให้สัญญาณความถี่ต่ำและลดแอมพลิจูด (Amplitude) ของสัญญาณในย่านความถี่ที่สูงกว่าความถี่คัตออฟ) ที่ออกแบบมาเป็นพิเศษ เรียกว่า Sinus Filter ซึ่งสามารถตัดกระแสที่มีความถี่สูง ผลที่ได้รับคือทรงรูปคลื่นของแรงดันที่เทอร์มินอลของมอเตอร์จะเป็น Pure Sinusoidal Differential ซึ่ง Sinus Filter สามารถลดผลกระทบของการเกิดแรงดันไฟฟ้าเกิน (Overvoltage) และลดปัญหาการรบกวนทางสนามแม่เหล็กไฟฟ้า (Electromagnetic Compatibility: EMC) ได้
หากใช้งาน Sinus Filter ร่วมกับ Common Mode Filter จะสามารถกำจัดกระแสที่ตลับลูกปืน (รูปที่ 3) และยังลดปัญหาการรบกวนโดยสนามแม่เหล็กไฟฟ้า (EMC) ในแหล่งจ่ายได้อีกด้วย การใช้งานฟิลเตอร์ทั้ง 2 ชนิดร่วมกันนั้น เป็นวิธีการแก้ปัญหาที่ได้ผลมากที่สุดในการหลีกเลี่ยงปัญหาที่จะเกิดขึ้นในการใช้งานอินเวอร์เตอร์ต่อร่วมกับมอเตอร์ อีกทั้งยังเป็นวิธีที่ประหยัดหากสายไฟของมอเตอร์นั้นมีขนาดที่ยาวและเป็นงานที่ไม่ต้องการสายที่มีฉนวน
สรุป
เมื่อใช้งานอินเวอร์เตอร์ ร่วมกับมอเตอร์ไฟฟ้า การเปลี่ยนสถานะที่รวดเร็วของทรานซิสเตอร์ และสายไฟของมอเตอร์ที่ยาวนั้น สามารถทำให้เกิดแรงดันไฟฟ้าสูงสุด (Peak Voltage) ได้มากถึง 2 เท่าของ DC Link Voltage ในบางกรณีนั้นแรงดันไฟฟ้าสูงสุด (Peak Voltage) ที่สูงอาจจะทำให้อายุการใช้งานของฉนวนขดลวดมอเตอร์นั้นลดลงซึ่งจะทำให้มอเตอร์นั้นชำรุดได้ เพื่อที่จะให้อายุการใช้งานของมอเตอร์ได้เท่าปกตินั้นควรจะต้องทำตามขั้นตอนดังนี้
• หากเป็นไปได้ให้เลือกใช้สายที่ไม่มีฉนวน
• เลือกใช้อินเวอร์เตอร์ซึ่งมีซอฟต์แวร์ที่ช่วยในการกำจัด Voltage Reflection Superimposition
• ลดระยะของสายไฟระหว่างมอเตอร์และอินเวอร์เตอร์
• ลดความถี่ในการสวิตชิ่ง (Switching Frequency) ของตัวอินเวอร์เตอร์ (2.5KHz เป็นค่าที่แนะนำ)

107/1 ถ.เฉลิมพระเกียรติ ร.9 แขวงประเวศ เขตประเวศ กรุงเทพฯ 10250
Tel : 02-726-8000
Fax : 02-726-8266
Email : sales@pneumax.co.th
To reset your password, enter the email address you use to sign in to form